|
Tutorial - VC-Z HALCON Image Acquisition Interface
1.0
|
|
Tutorial - VC-Z HALCON Image Acquisition Interface
1.0
|
HALCON is ported for the VC-Z platform from Vision Components. There is a VC-Z embedded HALCON runtime where the initial workflow is described below:
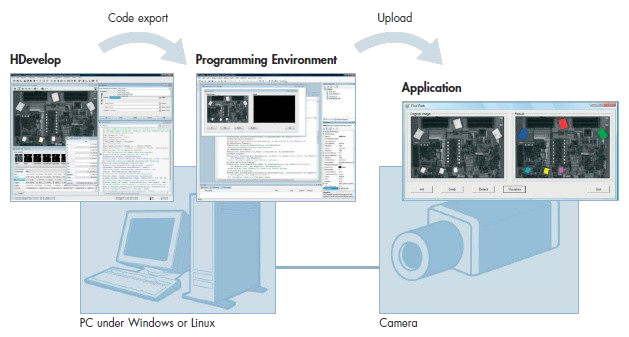
This initial workflow is described in a detailed tutorial on the Vision Components website. This extends the HALCON integration of the camera by adding a specific Image acquisition interface. By this way we are able to simplify the initial workflow. Now we can build one simple .hdev program and upload it directly to the camera. No need to use the Programming Environment to cross compile a program. We run the HDevelop program directly on the embedded platform in order to build a complete vision application.
The workflow becomes simpler:
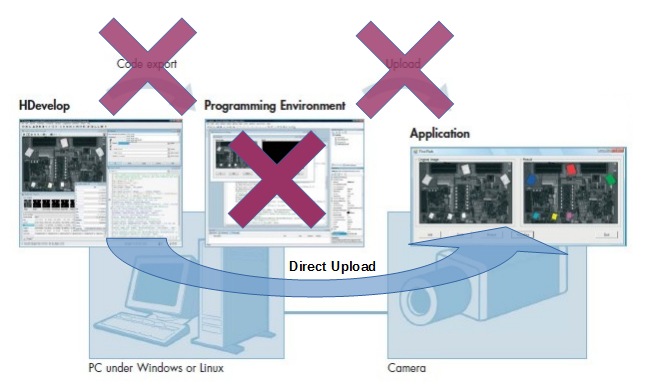
This tutorial follows step by step this workflow to build an embedded vision application in this simple way.
We need to describe the aim of the Vision Application built during this tutorial. The camera will see a Box with a circle pattern on the upper face. The aim of the application is to detect the 3D position of the Box.

At the end of this tutorial, we will be able to measure the distance of the Box to the camera and the processing time. Additionally we will draw a virtual 3D 'teapot' on the box for an application with augmented reality:

You need these elements:
The latest revision of the VC-Z HALCON Image Acquisition Interface is always included in the latest VC Lib Q package.
The interface can be used on all ARM-based smart cameras from Vision Components. There are four sensors from 0.5MPix to 3MPix and there are 3 possible housings:

Next section: How to get images